Digital Twin & DX
디지털 트윈과 디지털 전환(DX)
21세기 전반부에 시작된 제4차 산업혁명의 진전에 따라 디지털 전환(DX: Digital Transformation)이 광범위한 영역에서 진행되면서 디지털 트윈(Digital Twin)이 디지털 전환의 핵심 기술로 주목받고 있다(심진보 외, 2021).1
디지털 트윈에 대한 개념은 2002년 미국 미시간 대학교(University of Michigan)의 마이클 그리브스(Michael Grieves) 박사가 제품생명주기(Product Lifecycle Management) 의 관점에서 최초로 제안한 개념이다(Michael Grieves, 2016).2
2012년 미국 항공우주국(NASA)의 로드맵 보고서에는 생애주기관리(Lifecycle Management)와 시스템 통합(System Integration), 실시간 지속 상태 관리를 위하여 고충실도 물리 모델을 기반으로 한 디지털 트윈(Digital Twin)이 중요하게 다루어지고 있다.3
즉, 디지털 트윈은 갑자기 나타난 새로운 기술이 아니며, 생애주기관리와 시스템 통합의 연속선상 속에서 고충실도 물리 모델이 결합되고, 다양한 분야에 응용되는 형태이며, 현실 세계(현장)에서 수집된 데이터를 연계하고, 시각화하여 가상공간에서 현실 세계의 문제를 해결하기 위한 다양한 모의(시뮬레이션)이나 분석을 수행하고, 예측 판단 및 제어를 가능하게 하는 기술이다.
- 1 심진보, 원용숙, 홍아름, 김향석(2021. 12. 31.), 디지털 트윈 국가투자전략 연구, 한국전자통신연구원 지능화융합연구소 기술정책연구본부
- 2 Michael Grieves(2016, 8), Origins of the Digital Twin Concept, Florida Institute of Technology
- 3 Mike Shafto, Michael Conroy, R Doyle, E Glaessgen, C Kemp, J LeMoigne, L Wang(2010, 11), Modeling, Simulation, Information Technology and Processing Roadmap, Technology Area 11, NASA
-
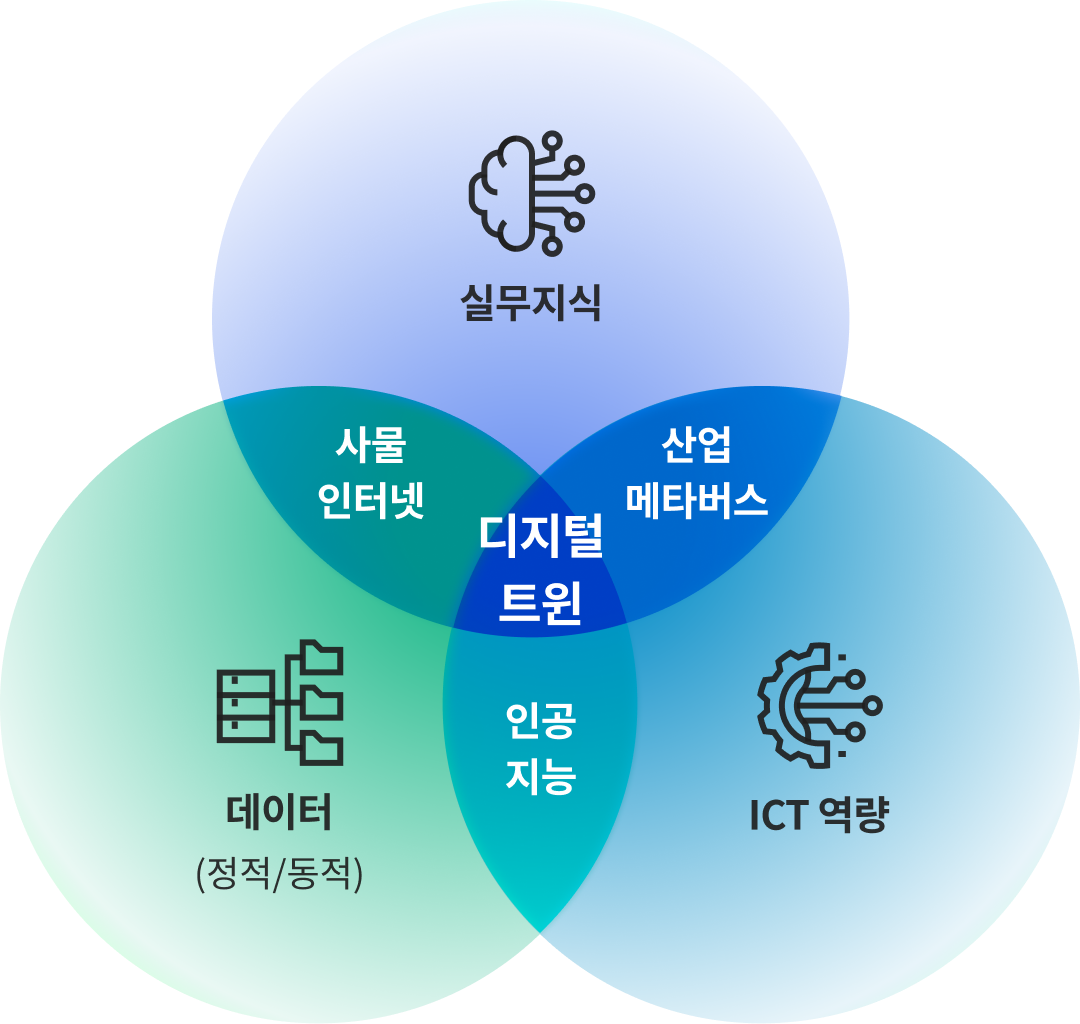
디지털 트윈은 데이터(정적·동적), ICT 역량, 실무지식이 결합되고, 사물인터넷과 산업 메타버스, 인공지능 기술을 통해 현실세계와 가상세계를 연결하는 개념을 나타낸 도표이다. -

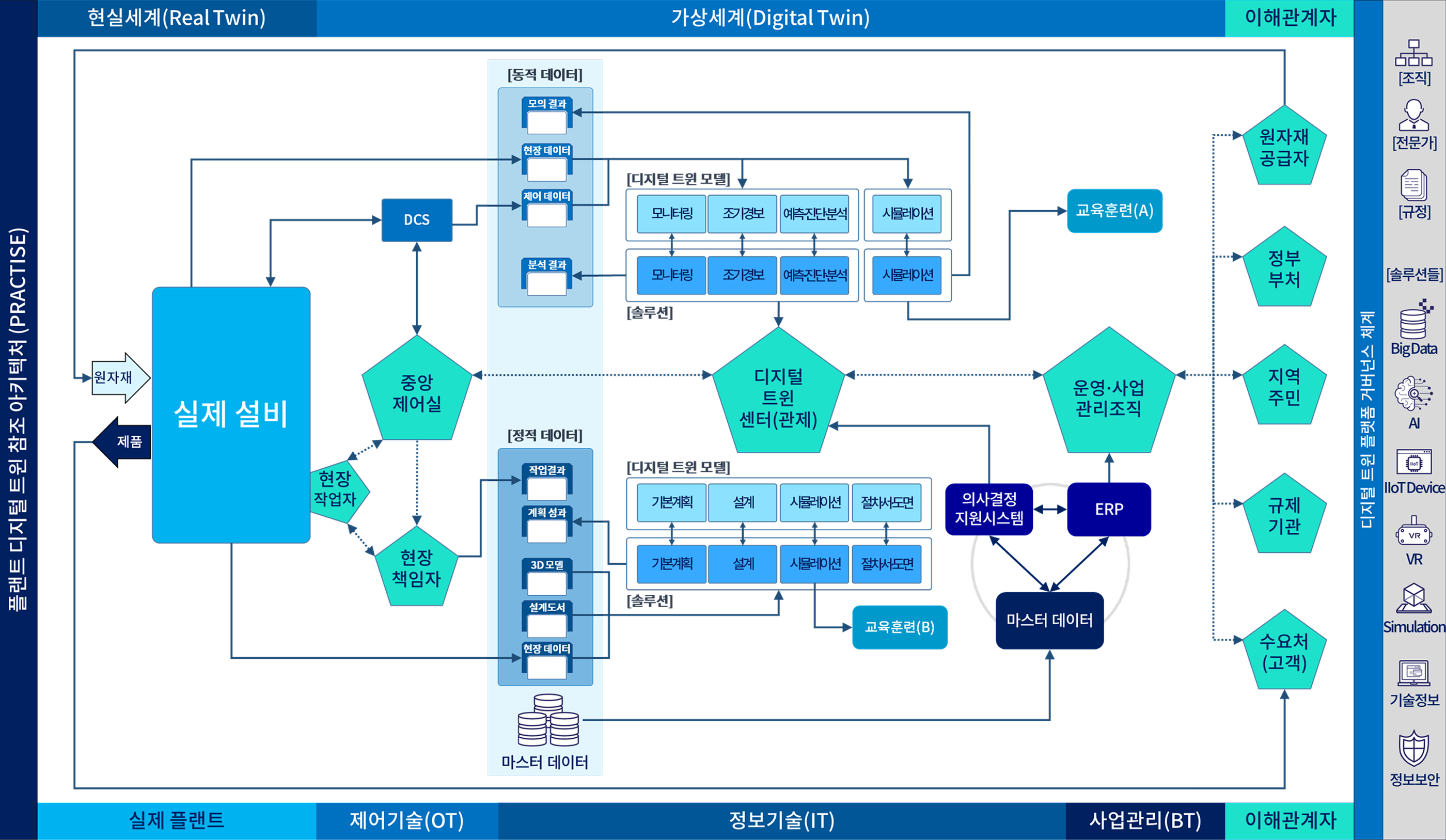
플랜트 디지털 트윈
Reference Architecture
(관련 특허: 10-2212390)
Digital Twin Level (1~5단계)
‘디지털 기술 간 융합된 기술 플랫폼’으로 디지털 트윈을 구성하는 핵심 기술은 다음과 같이 구분할 수 있다.
- ① 가시화 & 운영
- ② 분석
- ③ 다차원 모델링 & 시뮬레이션
- ④ 연결
- ⑤ 데이터 & 보안
- ⑥ 동기화
또한, 개별 디지털 트윈 간 ⑦ 연합(Federation) 기술을 통해 확장이 가능하다.
| 기술 단계 | 정의 | 설명 |
|---|---|---|
| 5단계 | 자율 DTW's (Autonomous) | 개별 및 복합 디지털 트윈에서 자율적으로 문제점을 인지하고 해결하여 물리 대상 최적화 |
| 4단계 | 연합 DTW's (Federated) | 최적화된 개별 물리 대상들이 상호 연계된 복합 디지털 트윈을 재구성하고, 물리 대상 간 상호 운용성 최적화 |
| 3단계 | 모의 DTw (Modeling & Simulation) | 디지털 트윈 모의 결과를 적용한 물리 대상 최적화 |
| 2단계 | 관제 DTw (Monitoring) | 디지털 트윈 기반 물리 대상 모니터링 및 관계 분석을 통한 제어 |
| 1단계 | 모사 DTw (Mirroring) | 물리 대상을 디지털 트윈으로 복제 |
디지털 트윈 기술 기반의 DX & AX 추진 단계
-
컨설팅DX & AX 컨설팅
- 수요처 데이터 주권 및 보안 정책 수립
- 수요처 자료 수집 및 니즈(Needs) 분석
- DX & AX 컨설팅 보고서
- Digital Twin 플랫폼 설계
-
POCDX POC 프로젝트
- 핵심 설비 데이터 디지털화 및 마스터 데이터 구축
- 실시간 모니터링 구현
- 데이터 표준화(AAS)
- 데이터 디지털화
- Digital Twin 플랫폼 구축
-
고도화DX 고도화 및 AX 시범 추진 프로젝트
- 정형 업무 AI 솔루션 개발 및 적용
- 원격 협업 솔루션 개발 및 적용
- 조기 경보, 예측 진단 AI 솔루션
- 원격 협업 솔루션
-
현업 적용AX 고도화 프로젝트
- 비정형 업무 AI 솔루션 개발 및 적용
- 생성형 AI 솔루션 개발 및 적용
- 비정형 업무 AI 솔루션
- 생성형 AI 솔루션